Аптымізацыя прадукцыйнасці з MPU-6050: налада, каліброўка і прыкладанні
2024-04-25
9219
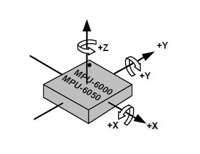
MPU-6050 з'яўляецца першым у свеце інтэграваным 6-восевым кампанентам апрацоўкі руху, які інтэгруе 3-восевы гіраскоп, 3-восевы акселерометр і маштабаваны працэсар лічбавага руху (DMP).Мэтай выкарыстання яго з'яўляецца атрыманне кута нахілу аб'екта, які трэба вымераць (напрыклад, чатырохкоптэр, балансавальны аўтамабіль) на восі X, Y і Z, гэта значыць кут кроку, кут рулона і кут пазяхання.Мы прачыталі шэсць дадзеных MPU-6050 (значэнне паскарэння трохсіснага паскарэння і трохсісную вуглавую хуткасць AD) праз інтэрфейс I2C.Пасля апрацоўкі зліцця паставы можна вылічыць крок, рулет і куты пазяхання.У якасці накіраванага даведкі для значэнняў вымярэнняў вызначэнне кірунку каардынату датчыка паказана на малюнку ніжэй, які вынікае з прынцыпу правай сістэмы каардынат (гэта значыць, правы вялікі палец паказвае на станоўчы кірунак X-Восі, паказальны пальца паказвае на станоўчы кірунак восі y, а сярэдні палец паказвае на станоўчы кірунак восі z).
Каталог
З дапамогай спецыялізаванай датчынай шыны I2C MPU-6050 можа атрымліваць увод непасрэдна з знешняга 3-восевага компаса, забяспечваючы поўны вывад 9-восевага руху ™.Гэта выключае праблему неадпаведнасці паміж камбінаваным тэрмінам гіраскопа і паскаральнікам і значна памяншае прастору ўпакоўкі ў параўнанні з шматкампанентнымі растворамі.Пры падключэнні да трохсіснага магнітаметра, MPU-60X0 здольны забяспечыць поўны вывад руху 9-восевага руху ў галоўны I2C або SPI Port (звярніце ўвагу, што порт SPI даступны толькі на MPU-6000).
Альтэрнатывы і эквіваленты
- MPU-3300
- MPU-6000
- MPU-6500
Вытворца MPU-6050
Вытворцам MPU-6050 з'яўляецца TDK.Пасля таго, як два заснавальнікі TDK, доктар Ёгара Като і Такей Такей, вынайшлі Ferrite ў Токіо, яны заснавалі Tokyo Denkikagaku Kogyo K.K.У 1935 годзе. Як глабальны брэнд галіны электронікі, TDK заўсёды займаў дамінуючую пазіцыю ў галіне электроннай сыравіны і электронных кампанентаў.TDK's comprehensive and innovation-driven product portfolio covers passive components such as ceramic capacitors, aluminum electrolytic capacitors, film capacitors, magnetic products, high-frequency components, piezoelectric and protection devices, as well as sensors and sensor systems (such as temperature and pressure,Датчыкі магнітных і MEMS) і г.д. Акрамя таго, TDK таксама забяспечвае харчаванне і энергетычныя прылады, магнітныя галоўкі і іншыя прадукты.Яго брэнды прадуктаў ўключаюць TDK, EPCOS, Invensense, Micronas, Tronics і TDK-Lambda.
Унутраная блок-схема MPU-6050
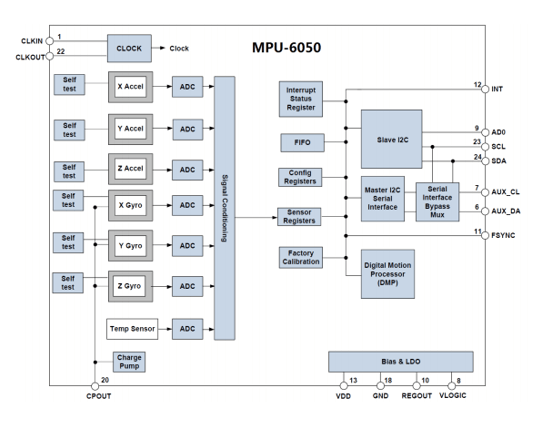
Сярод іх SCL і SDA-гэта інтэрфейсы IIC, падлучаныя да MCU, і MCU кіруе MPU-6050 праз гэты інтэрфейс IIC.Існуе таксама інтэрфейс IIC, а менавіта AUX_CL і AUX_DA.Гэты інтэрфейс можа быць выкарыстаны для падлучэння знешніх рабаўладальнікаў, такіх як магнітныя датчыкі, для фарміравання датчыка дзевяці восі.Vlogic - гэта напружанне порта IO.Гэты штыфт можа падтрымліваць як мінімум 1,8 У.Звычайна мы падключаем яго непасрэдна да VDD.AD0 - гэта штыфт кіравання адрасамі інтэрфейсу раба IIC (падлучаны да MCU).Гэты штыфт кіруе самым нізкім бітам адраса IIC.Калі ён падлучаны да GND, IIC-адрас MPU-6050 складае 0x68;Калі ён падлучаны да VDD, гэта 0x69.Звярніце ўвагу, што адрас тут не ўключае ў сябе найменшы біт перадачы дадзеных (самы нізкі біт выкарыстоўваецца для прадстаўлення аперацый чытання і запісу).На MWBalancedStc15 AD0 падключаецца да GND, таму IIC-адрас MPU-6050 складае 0x68 (без уліку найменшага біта).
Ініцыялізаваць інтэрфейс IIC
MPU-6050 выкарыстоўвае IIC для зносін з STC15, таму нам трэба ініцыялізаваць лініі дадзеных SDA і SCL, падлучаныя да MPU-6050.
Скінуць MPU-6050
Гэты этап аднаўляе ўсе рэгістры ўнутры MPU-6050 да значэнняў па змаўчанні, што дасягаецца напісаннем ад 1 да BIT7 Рэестра кіравання харчаваннем 1 (0x6B).Пасля скіду рэестр кіравання электраэнергіяй 1 будзе адноўлены да значэння па змаўчанні (0x40), і гэты рэестр павінен у далейшым усталяваць 0x00, каб прачнуцца MPU-6050 і змясціць яго ў звычайны працоўны стан.
Усталюйце поўнамаштабны дыяпазон датчыка кутняй хуткасці (Gyro) і датчыка паскарэння
На гэтым этапе мы ўсталявалі поўнамаштабны дыяпазон (FSR) двух датчыкаў праз рэестр канфігурацыі гіраскопа (0x1b) і Рэестр канфігурацыі паскарэння (0x1c) адпаведна.Звычайна мы ўсталёўваем поўнамаштабны дыяпазон гіраскопа да ± 2000DPS і поўнамаштабны дыяпазон акселерометра да ± 2G.
Усталюйце іншыя параметры
Тут нам таксама трэба наладзіць наступныя параметры: адключыць перапынкі, адключыць інтэрфейс AUX I2C, адключыць FIFO, усталяваць хуткасць адбору гіраскопа і наладзіць лічбавы фільтр з нізкім узроўнем праходу (DLPF).Паколькі мы не выкарыстоўваем перапынкі для чытання дадзеных у гэтай главе, неабходна адключыць функцыю перапынення.У той жа час, паколькі мы не выкарыстоўваем інтэрфейс AUX I2C для падлучэння іншых знешніх датчыкаў, нам таксама трэба закрыць гэты інтэрфейс.Гэтыя функцыі можна кантраляваць праз рэестр уключэння перапынення (0x38) і рэестр кіравання карыстальнікам (0x6a).MPU-6050 можа выкарыстоўваць FIFO для захоўвання дадзеных датчыкаў, але мы не выкарыстоўвалі іх у гэтым раздзеле, таму ўсе каналы FIFO павінны быць закрыты.Гэта можна кантраляваць праз рэестр Fifo Enable (0x23).Па змаўчанні значэнне гэтага рэестра складае 0 (гэта значыць, FIFO адключана), таму мы можам непасрэдна выкарыстоўваць значэнне па змаўчанні.Хуткасць адбору гіраскопа кантралюецца Рэестрам раздзяляльніка хуткасці адбору (0x19).Звычайна мы ўсталёўваем гэтую хуткасць адбору да 50. Канфігурацыя лічбавага фільтра з нізкім узроўнем праходу (DLPF) завяршаецца праз рэестр канфігурацыі (0x1a).Наогул кажучы, мы ўсталюем DLPF да паловы прапускной здольнасці, каб збалансаваць дакладнасць дадзеных і хуткасць рэагавання.
Наладзьце крыніцу сістэмнага гадзінніка і ўключыце датчык кутняй хуткасці і датчык паскарэння
Настройка крыніцы сістэмнага гадзінніка залежыць ад Рэестра кіравання магутнасцю 1 (0x6b), дзе самыя нізкія тры біты гэтага рэестра вызначаюць выбар крыніцы гадзінніка.Па змаўчанні гэтыя тры біты ўсталёўваюцца ў 0, што азначае, што сістэма выкарыстоўвае ўнутраны асцылятар RC 8MHz у якасці крыніцы гадзінніка.Аднак, каб павысіць дакладнасць гадзінніка, мы часта ўсталёўваем яго на 1 і выбіраем PLL-восі х гіраскопа ў якасці крыніцы гадзінніка.Акрамя таго, уключэнне датчыка кутняй хуткасці і датчыка паскарэння таксама з'яўляецца важным этапам працэсу ініцыялізацыі.Абедзве аперацыі рэалізуюцца праз рэестр кіравання харчаваннем 2 (0x6c).Проста ўсталюйце адпаведны біт да 0, каб актываваць адпаведны датчык.Пасля выканання вышэйзгаданых крокаў MPU-6050 можа ўвесці звычайны працоўны статус.Тыя рэгістры, якія не ўстаноўлены, будуць прыняць значэнні па змаўчанні, прадугледжаныя сістэмай.
Як працуе MPU-6050?
Датчык гіра
Датчык абсталяваны гіраскопам унутры, які заўсёды застанецца паралельным першапачатковым кірункам з -за гіраскапічнага эфекту.Такім чынам, мы можам разлічыць кірунак і кут павароту, выявіўшы адхіленне гіраі з першапачатковага кірунку.
Датчык акселерометра
Датчык акселерометра - гэта прылада, якое можа вымераць паскарэнне, і ён працуе на аснове прынцыпу п'езаэлектрычнага эфекту.Падчас паскарэння датчык вымярае інерцыяльную сілу, якая прымяняецца да масавага блока, а затым разлічвае значэнне паскарэння з выкарыстаннем другога закона Ньютана.
Працэсар лічбавага руху (DMP)
DMP-гэта модуль апрацоўкі дадзеных у чыпах MPU6050, які мае ўбудаваны алгарытм фільтрацыі Kalman для атрымання дадзеных з датчыкаў гіраскопа і акселерометра і апрацоўкі выхаднога краёўнічання.Гэтая асаблівасць значна памяншае нагрузку перыферычнага мікрапрацэсара і пазбягае стомнага працэсу фільтрацыі і зліцця дадзеных.
Заўвагі:
Кватэрыі: Кватэрыі - гэта простыя нумары суперкомплекса.Складаныя лічбы складаюцца з рэальных лікаў, а таксама ўяўнай адзінкі I, дзе i^2 = -1.
Дзе выкарыстоўваецца MPU-6050?
- Цацкі
- трубку і партатыўныя гульні
- Кантролеры на аснове руху
- Technology BlurFree ™ (для стабілізацыі відэа/нерухомасці)
- Тэхналогія AirSign ™ (для бяспекі/аўтэнтыфікацыі)
- Распазнаванне жэсту Instant Gesture ™ IG ™
- Насільныя датчыкі для здароўя, фітнесу і спорту
- Рамка гульняў і прыкладанняў з падтрымкай руху
- Тэхналогія MotionCommand ™ (для жэстаў кароткіх разрэзаў)
- Паслугі на аснове месцазнаходжання, цікавыя месцы і мёртвыя расплаты
- 3D -пульт дыстанцыйнага кіравання для інтэрнэт -падлучаных DTVS і ўсталюйце верхнія скрыні, 3D -мышы
- TouchAnywhere Technology (для "No Touch" кантроль прыкладанняў/навігацыі)
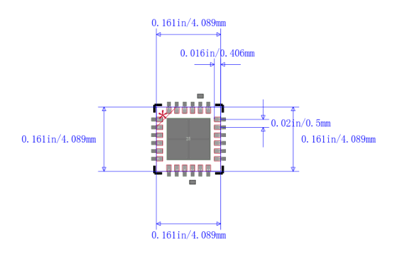
Пакет MPU-6050
Як паменшыць шум MPU-6050?
Мы можам прыняць наступныя спосабы зніжэння шуму MPU-6050.
Выкарыстоўвайце калібраваныя датчыкі
Калібруючы акселерометр і гіраскоп MPU-6050, можа выключыць зрушэнне і памылку саміх датчыкаў, зніжаючы такім чынам эфект шуму.Працэс каліброўкі звычайна складаецца з двух этапаў: статычная каліброўка і каліброўка руху.
Працэс фільтрацыі абсталявання
Даданне фільтравых кандэнсатараў да лініі электраперадачы MPU-6050 можа знізіць уздзеянне шуму электразабеспячэння на датчык.Між тым, падчас планіроўкі друкаванай платы мы павінны паспрабаваць утрымаць MPU-6050 ад патэнцыйных крыніц перашкод, такіх як сігнальныя лініі высокай частоты і кампаненты высокай магутнасці.
Апрацоўка фільтрацыі праграмнага забеспячэння
Пасля збору неапрацаваных дадзеных з MPU-6050 мы можам дадаць спасылку на фільтрацыю праграмнага забеспячэння для папярэдняй апрацоўкі першапачатковых дадзеных для ліквідацыі перашкод, выкліканых шумам.Звычайна выкарыстоўваюцца метады фільтрацыі праграмнага забеспячэння ўключаюць сярэднюю фільтрацыю, сярэднюю фільтрацыю, фільтрацыю Кальмана і гэтак далей.
Выкарыстоўвайце ўнутраны фільтр з нізкім узроўнем праходу
MPU-6050 мае ўнутраны інтэграваны лічбавы фільтр з нізкім узроўнем праходу, які можа быць выкарыстаны для зніжэння высокачашчыннага шуму, усталяваўшы яго частату адсячэння.У прыватнасці, мы можам усталяваць частату адсячэння лічбавага фільтра, змяніўшы рэестр канфігурацыі MPU-6050 для ліквідацыі высокачашчыннага шуму, выкліканага адборам A/D.
Разлік траекторыі руху на аснове MPU-6050
MPU-6050-гэта шасцівосевы датчык і датчык гіраскопа, які можна выкарыстоўваць для вымярэння руху і стаўленнем аб'ектаў.Разлік траекторыі руху на аснове MPU-6050 можа быць рэалізаваны наступнымі крокамі:
Першы крок - прачытаць дадзеныя датчыкаў.Нам трэба прачытаць дадзеныя акселерометра і гіраскопа з датчыкаў MPU-6050, выкарыстоўваючы адпаведныя драйверы і бібліятэчныя функцыі.Звычайна гэтыя дадзеныя выводзяцца ў лічбавым фармаце, таму для пераўтварэння іх у фактычныя вымярэнні ў фізічных адзінках патрабуецца пэўная пераўтварэнне і праца па каліброўцы.
Другім крокам з'яўляецца разлік паскарэння.Па -першае, нам трэба апрацоўваць дадзеныя з акселерометра, каб атрымаць паскарэнне аб'екта на кожнай восі.Пасля, каб разлічыць хуткасць і зрушэнне аб'екта на кожнай восі, нам трэба інтэграваць дадзеныя паскарэння.Метады лікавай інтэграцыі, такія як метад Эйлера або метад Lunger-Kutta, часта выкарыстоўваюцца ў гэтым працэсе для забеспячэння дакладнасці разлікаў зрушэння.
Трэці крок - вылічыць вуглавую хуткасць.Выкарыстоўваючы дадзеныя гіраскопа, кутняя хуткасць аб'екта ў кожнай восі можна вылічыць.Зноў жа, гэтыя дадзеныя павінны быць адкалібраваны і пераўтвораны, каб атрымаць вуглавую хуткасць у рэальных фізічных адзінках.
Чацвёрты крок - разлік кручэння.Пры інтэграцыі дадзеных кутняй хуткасці можна вылічыць кут павароту аб'екта ў кожнай восі.Гэта можна зрабіць з выкарыстаннем метадаў лікавай інтэграцыі, такіх як метад Эйлера або метад Longe-Kutta для вылічэння кута.
Пяты крок - аб'яднаць дадзеныя.Мы аб'ядноўваем дадзеныя з акселерометраў і гіраскопаў, каб атрымаць поўную інфармацыю аб стане і інфармацыі аб аб'екце.Гэта можна зрабіць з выкарыстаннем алгарытмаў, такіх як рашальнік стаўленне на кваліфікацыі або рашальнік Euler Cungle.
Шосты крок - гэта візуалізацыя вынікаў.Мы пераўтвараем вылічаную траекторыю руху аб'екта ў набор кропак у 3D -сістэме каардынат і адлюстроўвае яе з выкарыстаннем адпаведных інструментаў візуалізацыі для больш інтуітыўнага разумення траекторыі руху аб'екта і зменаў стаўленне.
Часта задаюць пытанні [FAQ]
1. Наколькі дакладная MPU6050?
Набытыя вынікі паказалі дастатковую дакладнасць менш за 1 % і надзейнасць, забяспечваючы належнае вымярэнне вала ліфта і высокія стандарты ліфтавай галіны.
2. Як чытаць дадзеныя з MPU6050?
Каб прачытаць унутраныя рэгістры MPU6050, Майстар адпраўляе ўмову запуску, а затым адрас раба I2C і біт запісу, а затым адрас рэестра, які будзе прачытаны.
3. Дзе выкарыстоўваецца MPU6050?
У насільных санітарных прыладах, прылад для адсочвання фітнесу.У беспілотных беспілотніках і чатырохкоптах MPU6050 выкарыстоўваецца для кіравання становішчам.Выкарыстоўваецца для кантролю робататэхнічнай рукі.Прылады кіравання жэстамі ўручную.
4. Ці з'яўляецца MPU6050 IMU?
Блок датчыка MPU6050 IMU чытае дадзеныя з датчыка MPU-6050, які падключаны да абсталявання.Блок выводзіць паскарэнне, вуглавую хуткасць і тэмпературу ўздоўж восяў датчыка.
5. Якая апрацоўка MPU6050?
Гэта ўбудаваны працэсар MPU6050, які спалучае дадзеныя, якія паступаюць з акселерометра і гіраскопа.DMP з'яўляецца ключом да выкарыстання MPU6050 і тлумачыцца падрабязна пазней.Як і ва ўсіх мікрапрацэсарах, DMP патрабуе прашыўкі для запуску.
тэст на функцыю.Самая высокая эканамічная прадукцыя і лепшая паслуга-гэта наша вечная прыхільнасць.
Гарачы артыкул
- CR2032 і CR2016 узаемазаменныя
- MOSFET: Вызначэнне, прынцып працы і выбар
- Рэле ўстаноўкі і тэставанне, інтэрпрэтацыя схемамі праводкі рэле
- CR2016 супраць CR2032 У чым розніца
- NPN супраць PNP: У чым розніца?
- ESP32 супраць STM32: Які мікракантролер лепш для вас?
- LM358 Двайны аператыўны ўзмацняльнік Комплекснае кіраўніцтва: Выпісы, схемы, эквіваленты, карысныя прыклады
- CR2032 супраць DL2032 VS CR2025 Кіраўніцтва па параўнанні
- Разуменне адрозненняў ESP32 і ESP32-S3 Тэхнічны і аналіз эфектыўнасці
- Падрабязны аналіз схемы серыі RC
 Вывучэнне магчымасцей і прымянення чыпа сувязі NRF24L01
Вывучэнне магчымасцей і прымянення чыпа сувязі NRF24L01
2024-04-25
 MMBT3904 NPN Transistor: яго тэхнічныя характарыстыкі, усёабдымнае кіраўніцтва па прыкладанні і MMBT3904 супраць MMBT5551
MMBT3904 NPN Transistor: яго тэхнічныя характарыстыкі, усёабдымнае кіраўніцтва па прыкладанні і MMBT3904 супраць MMBT5551
2024-04-25
Гарачы нумар часткі
 GRM1885C1H130JA01D
GRM1885C1H130JA01D C2012CH2A332J125AA
C2012CH2A332J125AA CGA4J1X7R1E335M125AD
CGA4J1X7R1E335M125AD CGA7M1C0G3F820K200KA
CGA7M1C0G3F820K200KA C1608X5R2A153M080AA
C1608X5R2A153M080AA EMK107BJ105KK-T
EMK107BJ105KK-T GCM1885C2A1R7CA16D
GCM1885C2A1R7CA16D 12065C152KHT1A
12065C152KHT1A GRM1555C1E300JZ01D
GRM1555C1E300JZ01D CS5509-ASZ
CS5509-ASZ
- MB9BF524KPMC-G-JNE2
- MCIMX31DVKN5D
- RT8452GQW
- TPS254900IRVCRQ1
- LTC2855IGN#PBF
- MSP430F110IPW
- ADS1146IPW
- ADXRS620BBGZ-RL
- T491D106K050AH2478
- LT3496EUFD#PBF
- TLV2402CDGKRG4
- T491C156K010ZTZB01ZV10
- SUCW62412C
- S25FL132K0XBHI033
- FS6377-01G-XTP
- 74LVT14PW
- AD22227S1
- B4002-0597
- CX25842-23P
- CY74FCT163646CPVC
- DS1834AU+T/R
- IDTQS3384QG8
- MBM29F040C-70PD-SFLE1
- MN101C49HNK
- SII7189CMHU-0
- TC4071BF
- TC74LCX16245FT
- XRD98L56AIV-F
- XWM8728EDS/R
- Z84C4406VEC-Z80SIO/4
- BPNGA16G
- FG6A046L06AA
- GT24C16-2ZLI-TR
- ST-L5007
- D61337F1
- X904169-003
- EEEFT1H331GV
- HD64F2140BTE10V
- LV2862XLVDDCR